

Get all things PLCnext Technology in one place. Read about user stories and real applications. Get support getting started with your PLCnext Control and PLCnext Engineer. Learn more about industry trends. Find open source code on Github or watch a tutorial. Talk to follow community members and our experts in the forum, ask a question or just exchange ideas.
Become part of the PLCnext Community
#iamplcnextArticles
What’s new?
Find out what’s new, where you can meet us nextand what we have been up to first.
Featured Articles

News & latest Articles



USE CASES AND APPLICATIONS
Made with PLCnext Technology
PLCnext Technology is much more than just a great vision.Let us enhance automation thinking together!
Industrial components for industrious processes
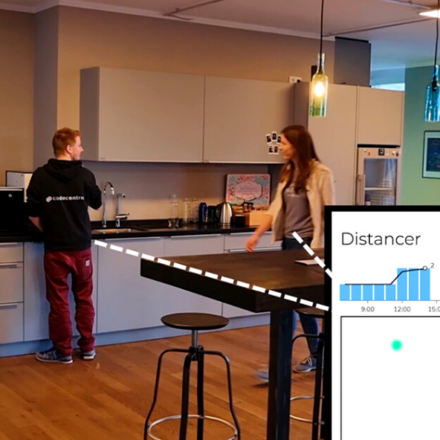
A successful collaboration between PLCnext Technology and Codecentric to create a next level distance tracking method….

A forum that accelerates innovation
How the Crowd Intelligence of the PLCnext Community helped realize an Artificial Intelligence project….

Creating tailor-made solutions
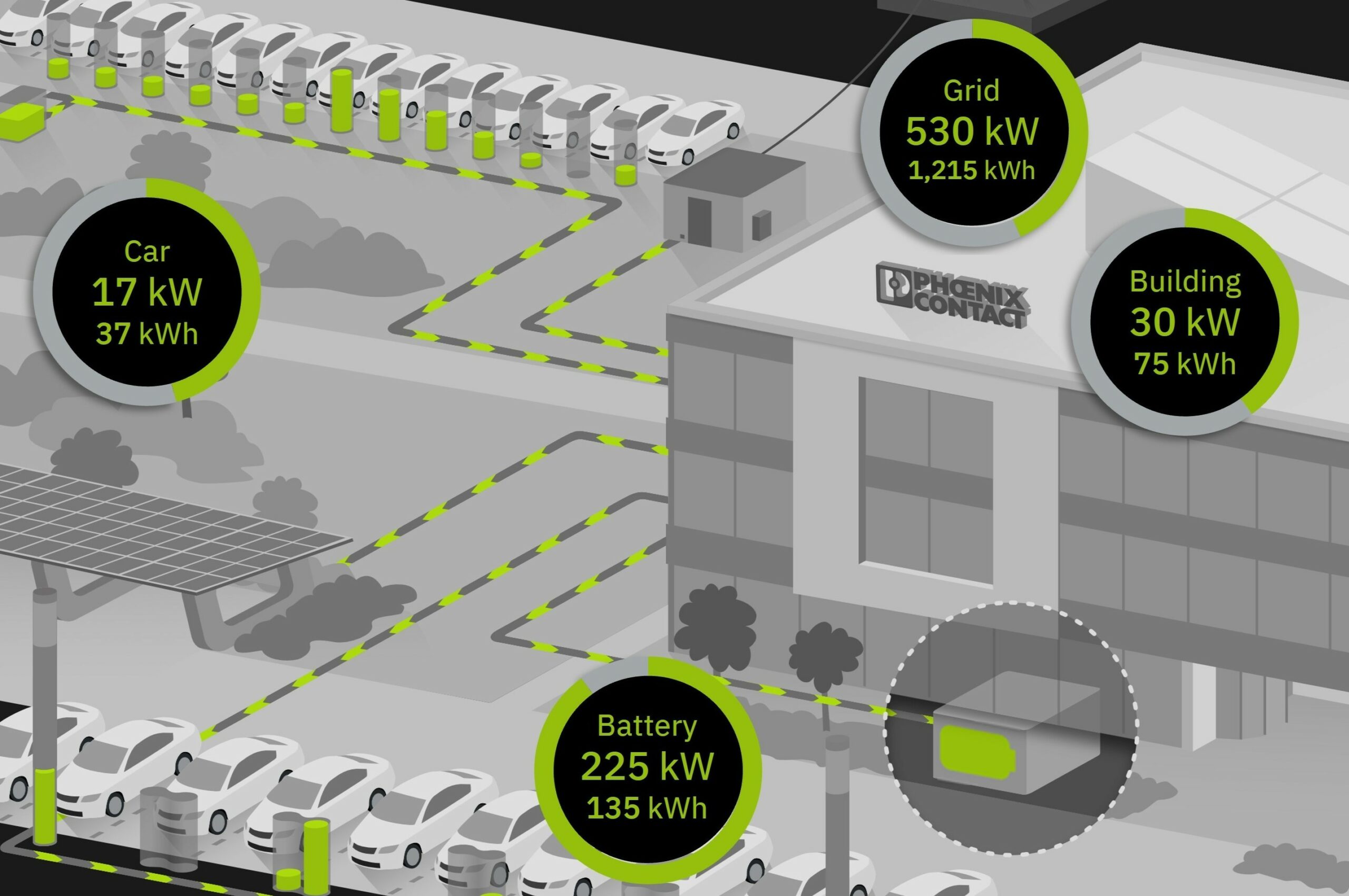
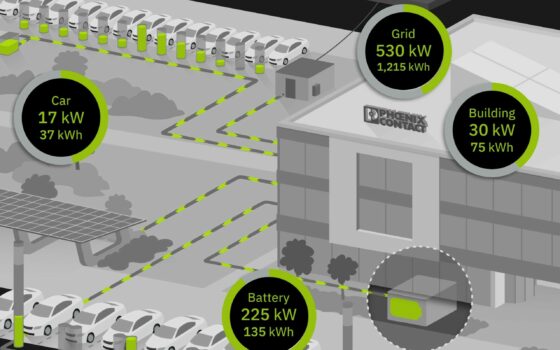
How PLCnext Technology helped a German solar park save energy and reduce costs….

Loaded, blue and just-in-time – AGV solutions from Phoenix Contact
AGVs are an intelligent solution for making processes more efficient and increasing flexibility. Read how PLCnext Technology can help fulfill the complex requirements of today´s AGVs….
MAKER’S BLOG
Stories from users for users
Find user stories and applications of interesting ideas and solutions in this blog. And add your own experiences.
GET INVOLVED

Get involved
Add your story to the Makers Blog and inspire others. Just login, then click “CREATE POST”.
LOGIN / REGISTER
MOST READ POSTS
06 Jul 2021
PLCnext Email & Text Alerts
Once you have your Phoenix Contact PLCnext Control data flowing to the cloud, it’s time to setup alerts and notifications…
05 Jul 2019
Read more posts
Installing Node.js on RFC 4072S
This blog explains how to install Node.js on the RFC 4072S thanks to Björn Sauer.
…GET INVOLVED
Get involved
Add your story to the Makers Blog and inspire others. Just login, then click “CREATE POST”.
LOGIN / REGISTER

PLCnext Technology
Getting Started
Program in style. With this PLCnext Technology Starterkit you can try out the operating principle, handling, and high performance of PLCnext Technology in a small-scale station.The stylish starterkit comes with a PLCnext Control AXC F 2152 and three Axioline Smart Elements I/O modules.
Happy programming everyone.
WEBINARS
Meet our experts online live
Learn more about PLCnext Technology from anywhere in the world with our webinars.

Upcoming Webinar
EVENTS
Visit us for networking:
Live on site and digitally!You can find us at various trade fairs and events.
We look forward to seeing you!
PLCnext Store
Extend your PLCnext Control with versatile software functions
Various types of apps provide you with limitless possibilities. Additional runtime environments, software libraries, function extensions such as cloud connectors or MQTT brokers up to ready-programmed solutions for specific use cases. The range of possibilities to expand the functions of your PLCnext Control is huge! You choose.
In-tech GmbH
Easymon AXC F 2152
Remote monitoring for PLCnext Control without programming. With easymon you can easily view any data values from your Control device live & remotely and monitor thresholds.

Phoenix Contact Belgium
Code Creator
Parametrize your Modbus communication as you need it. The Code creator automatically generates a program for the hardware set-up based on your input.
Phoenix Contact GmbH & Co. KG
Pump Station Control
Ready-programmed solution to transform your PLCnext Control into a pumping station without any engineering or programming effort! For continuous monitoring and controlling of your pumping stations.
Phoenix Contact GmbH & Co. KG
Water Functions Visu
Water Function Visu is designed to suit water specific applications. Ready-to-use symbols for valves, motors, pumps and fans allow for a quick and convenient visualization of devices. Installed drives and valves can be controlled via the HMI surface due to a remote functionality.
Phoenix Contact GmbH & Co. KG
Client for Eclipse hawkBit™ ARM
Firmware Update client for PLCnext Control. For managing your devices more efficiently and easy updating of PLCnext firmware in batches.
